
-
“Geef ze de klemmen!” Atlas heeft nu een paar koppelingsklauwen. Het kan ook tijd zijn voor een nieuw kofferdeksel.
Boston dynamiek
-
De eerdere handen van Atlas waren platte kussens of ballen, die beide alleen objecten konden grijpen door erop te drukken.
-
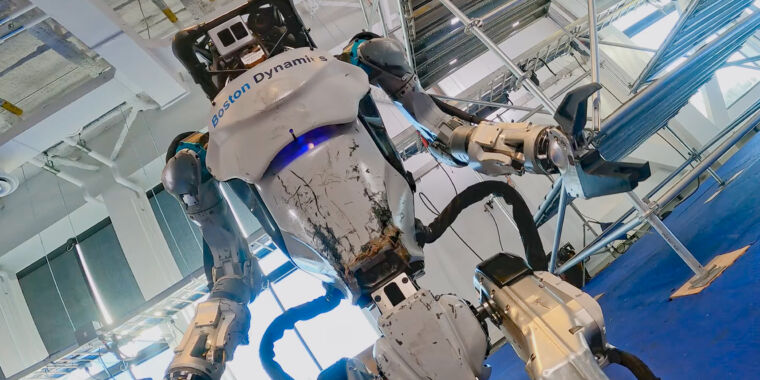
Klauw van dichtbij. Alleen de bovenste “duim” beweegt op deze foto. Kijk ook naar de schade die hij aanricht aan het bord. Het is niet schattig.
-
Til je benen op!
De Atlas van Boston Dynamics – ’s werelds meest geavanceerde robot – leert nieuwe trucjes. Het bedrijf gaf Atlas eindelijk de juiste handen, en wel in Boston Dynamics nieuwste youtube-videoAtlas probeert wat echt werk te doen. Er werd ook een ander vrijgelaten Achter de schermen filmpje Bekijk enkele van de werken die in de atlas zijn opgenomen. En als het niet goed gaat, zien we een aantal verbazingwekkende robotaanvallen in zijn inspanningen om mensachtige robots te ontwikkelen.
Als robot concentreerde Atlas zich voornamelijk op beweging, beginnend met lopen in een laboratorium, vervolgens over elk denkbaar onstabiel terrein lopen en vervolgens wat Parkour-trucs zijn ziek. Dat gezegd hebbende, de actie draait helemaal om de benen, en de bovenste helft voelt meestal als een bijzaak, waarbij de armen alleen worden gebruikt om te zwaaien voor evenwicht. Atlas had het voorheen niet handen –De laatste keer dat we haar zagen, waren er slechts twee onvolledige balgrepen aan het uiteinde van haar armen.
Deze nieuwere iteratie van de robot heeft de twee daadwerkelijke grijpers. Het zijn eenvoudige opklikbare handen met één beweegbare pols en vinger, maar dat is goed genoeg om dingen op te pakken. Het doel van deze video is om objecten met “traagheidsbelang” te verplaatsen – niet alleen lichte vierkanten, maar objecten die zo zwaar zijn dat ze Atlas uit balans kunnen brengen. Dit omvat zaken als een grote plank, een tas vol gereedschap en een halter van 10 pond. Atlas leert alles over die “gelijke en tegengestelde krachten” in de wereld.
Zoals alles in de robotica, is het oppakken en dragen van een object ingewikkelder dan het lijkt. Atlas moet zijn plaats in de wereld bepalen in relatie tot het object dat het oppakt, een grijpplan voor de handen bedenken en het object optillen en manipuleren, terwijl hij tegelijkertijd berekent hoe deze extra massa zijn evenwicht zal beïnvloeden. Zoals Robin Deits, software-engineer bij Boston Dynamics, in de video uitlegt: “Als we zoiets als een plank proberen te manipuleren, hoeven we alleen maar gefundeerde schattingen te maken over waar de plank is, hoe snel hij beweegt, hoe we de armen moeten bewegen om de plank draait zo snel 180 graden, en als we deze schattingen fout maken, doen we gekke dingen en vallen we om.”
Maar bij Atlas gaat het niet alleen om dingen oppakken en onhandig dragen. Hij rent, springt en draait terwijl hij zware voorwerpen draagt. Op een gegeven moment springt hij gooit De zware gereedschapskist van haar bouwpartner, allemaal zonder het evenwicht te verliezen. Dit alles doet ze op gammele steigers en ook op geïmproviseerde houten loopbruggen, waardoor de grond onder Atlas’ voeten constant beweegt bij elke stap. Het oppakken van voorwerpen is het begin van het leren van een robot om echt werk te doen, en het lijkt helemaal thuis op een ruige bouwplaats. Eenvoudige klauwkoppelingen betekenen dat Atlas alles verplettert wat het oppakt, met dingen zoals planken die zichtbare schade vertonen wanneer handen erin worden gegraven. Misschien zal de volgende reeks experimenten Atlas leren minder te zijn dan een gigantische gorilla.

‘Reader. Furious humble travel enthusiast. Extreme food scientist. Writer. Communicator.’




